What is GISS?
Download book in PDF, 5Mb2.1 Global active-passive three-dimensional radar of the earth's surface and near-earth space
2.1.1 In GISC, for radar monitoring of the earth's surface and near-earth space, the well-known method of active-passive radar is used, shown in Fig. 2.1.
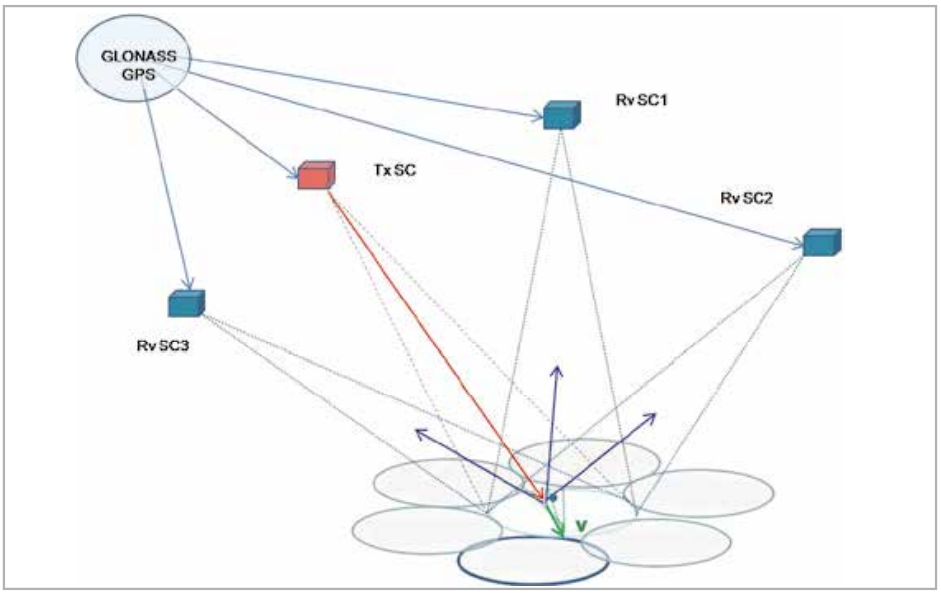
- Fig. 2.1 Principle of active-passive 3D radar.
Continuously emitted signals by the transmitting spacecraft (Tx SC) GISS in the L or X-band are reflected from the target (object) in space or on the surface of the Earth in all directions. The reflected signals are received by at least three Rv SC spacecraft of this system. The start time of emission and reception of reflected signals is precisely tied to a single time scale according to the signals of global space navigation systems (GLONASS, GPS or another SRNS), which all GISS spacecraft also use to determine their position in space.
Thus, the difference in time between the beginning of the emission of the probe signal of the Tx SC spacecraft and the time of the beginning of the reception of the reflected signal from the target, which has certain coordinates in three-dimensional space, on the Rv SC1 determines the surface of the ellipsoid of rotation, the focus of which are at the points of the current location of these spacecrafts, and the point with the coordinates of the target is located. Similarly, the surfaces of the ellipsoids of rotation are determined by the difference in the time of emission and reception of the reflected signal from the same target on Rv SC2 and Rv SC3. At the point of intersection of the three surfaces of the ellipsoids of rotation and will be the coordinates of the target.
A difficult complex mathematical solution to such a problem is simplified by a priori imposition of restrictions on the area of a possible solution, limited by the volume of space in a narrow beam of the transmitting antenna pattern and the generated reflected signals with a narrow pattern on the ground GRPS. The solution of the problem of obtaining a radar image (RI) is even more simplified if we use the method of solving the inverse problem known to all students.
Sets the coordinates of the point of interest in the space zone. Knowing the coordinates of the location of Tx SC, Rv SC1, Rv SC2 and Rv SC3, it is possible to calculate the time delays between the time of the beginning of radiation and the beginning of reception of reflected signals on these Rv SC. Cross-correlation processing of the probing and reflected signal segments stored in the archive is carried out, starting from the calculated delay values. Step-by-step changes in the specified coordinates of the target (zone) location are equivalent to changing the values of the time shift of signals during correlation processing, as a result, we get 3D radar images in the space zone around a given point.
The final solution to this problem lies with applied mathematicians. And, undoubtedly, it will be implemented during processing in ground GRPS, and may be its own special software in each of the participating countries in the creation of the GISS, especially for applied tasks of defense or special purposes. For the presentation of the general principle of functioning, it is important that this problem is solved.
Probing signals in the GISS are highly stable and coherent communication signals used for both radar and communication. The most acceptable for solving the set goals and tasks for such a system will be the use of OFDM signals similar to those used in terrestrial cellular systems 3G, 4G LTE (in the L-band) or 5G (in the X-band).
Knowing the exact value of the radiation frequency, the calculated values of the Doppler shift caused by the movement of the Tx SC, Rv SC1, Rv SC2 and Rv SC3, during cross-correlation processing, simultaneously with determining the exactvalue of the time delay, the value of the Doppler frequency shift caused by the target movement is also determined (see Fig. 2.2).
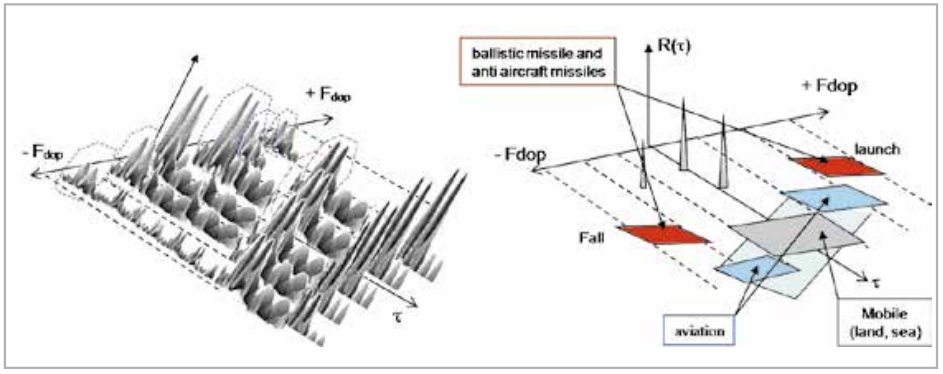
- Fig. 2.2 Opportunities for selection of moving targets.
Knowing the value of the Doppler shift caused by the movement of the target in three directions on Tx SC, Rv SC1, Rv SC2, Rv SC3, and the calculated differences of these values make it possible to determine the target velocity vector V in 3D space.
The accuracy of measuring the Doppler shift is about 10 Hz during the time of correlation accumulation when processing an array of samples of signals with a duration of 100 ms. This is enough to classify moving targets in space and on the surface of the ocean or land — aviation and its type (together with 3D radar images), ballistic and cruise missiles (BM and CM), anti-aircraft missiles (AAM). For existing space radar systems, this is an unsolvable problem.
To implement the method proposed in the patent for providing radar monitoring using a constellation of communication satellites with onboard signal processing, it is necessary to provide the following series of technical solutions.
2.1.2 Emitted IP packets on downlinks are formed into super-cycles, the beginning of the emission of which is precisely tied to a single time scale according to satellite radio navigation systems. Possible deviations in implementation and changes during operation are compensated for by amendments introduced during processing at ground-based GRPS as a result of calibration, including using control and adjustment stations and accumulated databases of geoinformation maps of the area.
Probing signals to the blocks of transmitting devices of the L- or X-band come from the unit for forming the cycles of the IP-packets of the sounding signals, they are transmitted continuously and represent a formed series of cycles from IP-packets of information transmitted on the downlinks of personal satellite communications, Internet access, interactive broadband, IoT and M2M applications. They are formed using information sent to active subscribers, which comes from ground transport networks into the interaction of the corresponding ground and on-board command and control complexes. Downstream IP packets of communication services are selected by the on-board router at the header address from all broadcast IP information flows via inter-satellite and uplink communication lines from the receiving-transmitting complexes of ground GRPS.
If the number of active subscribers is insufficient in relation to the constant transmission rate on the sounding radio link, the superframe generating units add SAR signal packets to the downstream stream with quasi-orthogonal sounding sequences of a known structure. These signals can be used, if necessary, to synthesize a radar sounding aperture and quickly detect targets in the entire large volume of near-earth space using one fragment of this SAR sounding signal during processing. The beginning of a transmission cycle for IP packets of sounding signals contains a header, which contains information about the spacecraft number, the cycle number, the time of the beginning of the cycle radiation and its format. At the end of the cycle, the shaping unit transmits a “shank” with a checksum and complement of bits to the multiple of the second time scale to the selected cycle period (Tcycle). The bit array of sounding signal cycles from the output of the forming unit simultaneously through the on-board router via the ISL and the Radio Link Module of the feeder line is transferred to the GRPS archive. The structure of the construction of the transmission cycles of IP packets of sounding signals is shown in Fig. 2.3.
The duration of the cycle period (Tcycle) is selected depending on the sounding mode. In the “wide RP” mode, the period can be uniform and amount to several tensof seconds. In the “with narrowing RP” mode Tcycle is determined by the scanning time of the global visibility zone and may not be uniform, but selected depending on the volume of traffic of high-speed communication services transmitted to the “narrowed” zone.
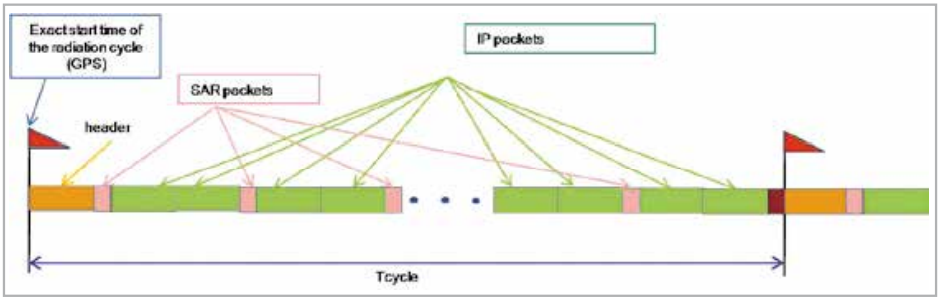
- Fig.2.3 Structure of the transmission cycle of probing signals.
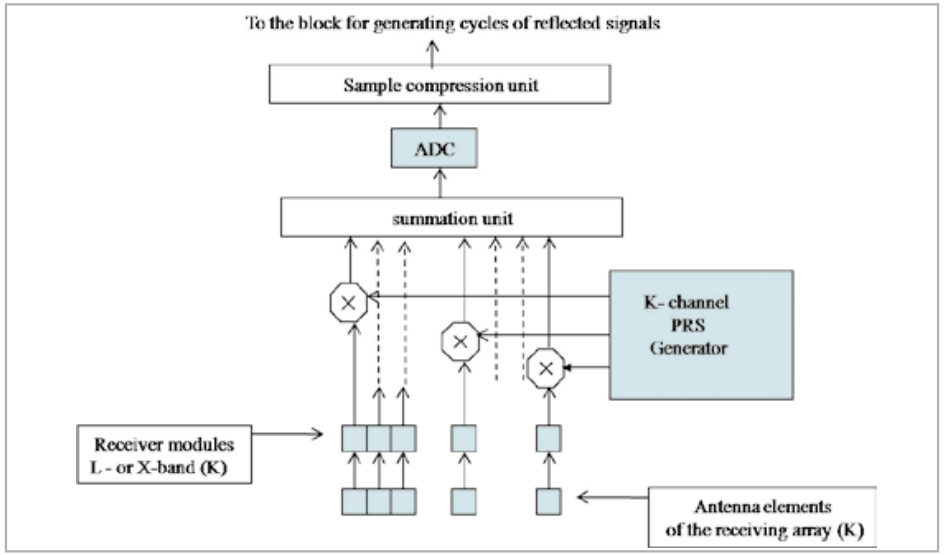
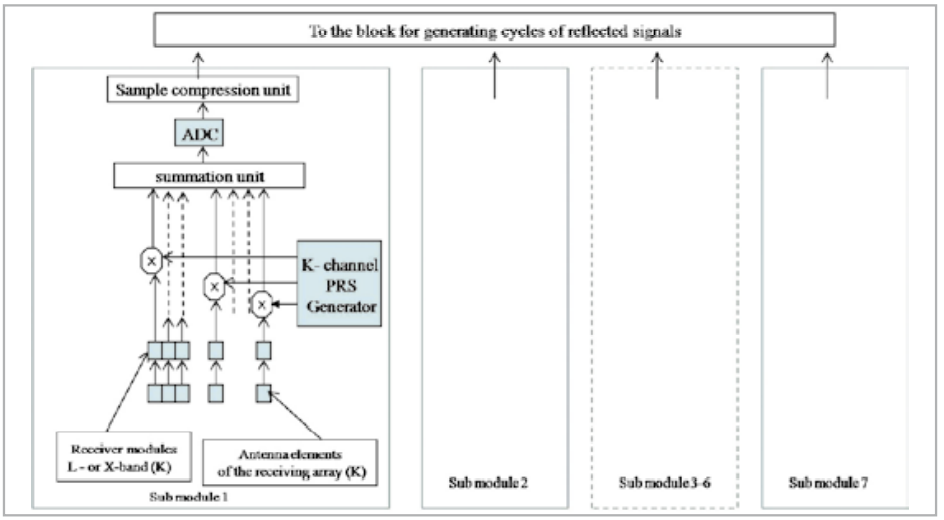
2.1.3 The received reflected sounding signals on the spacecraft from each of the K active elements (AE) of the receiving AA through the K-channel receiving devices block are fed to the inputs of the K multiplier block, where they are multiplied with the individual signals of pseudo-random sequences (PRS) coming from the PRS generator with K outputs and, then, to the input of the signal adder with K inputs, the action of which provides code multiplexing of the reflected sounding signals received by the K elements (AE) of the antenna array. This solution provides a reduction in the required transmission rate of the digital stream of reflected signals to ground-based GRPS.
Synchronization of the PRS generators is carried out by the onboard time signals of the spacecraft coming from the output of the satellite radio navigation unit, which provides the formation of reference frequencies and synchronization signals for all onboard units for receiving and transmitting radio signals transmitted over the ISL and radio communication lines with the GRPS and clock frequencies for the formation and transmission of all information signaling IP packets.
The total signal with code multiplexing from all received K reflected sounding signals by the AE elements from the output of the signal adder is fed to the input of the data compression unit for analog-to-digital conversion of the received reflected signals to reduce the required rate of their transmission through the ISL channels and the feeder line at the GRPS.
The structural and functional diagram of the formation of signal and information flows arriving at the input of the onboard module for the formation of received reflected signals is shown in Figure 2.4.
-
Fig. 2.4

The unit for forming the cycles of IP packets of the received reflected sounding signals forms data into standard IP packets from the digital samples of the total reflected signal with code multiplex successively arriving at its input.
Each packet header contains its identification information and the packet number in the loop. The beginning of each cycle of IP packets of reflected sounding signals contains a frame header packet, which contains information about the spacecraft number, cycle number, time of the beginning of signal reception in the cycle (time of arrival of the first digital sample of analog-to-digital conversion at the input/ output of the compression unit) and its format.The processing speed of these packets in the on-board router and the transmission rate of IP packets of reflected sounding signals over the ISL and on the feeder line of dumping information and signal flows are much higher than their formation rate. This allows restoring the input sequence of analog-to-digital readouts of the received reflected signals to the spacecraft at the output of the decompression unit at the GRPS, and using the numbers of the packet headers and their generation cycles to make their correct assembly and integrity control in order to avoid false radar images when processing in the GRPS.
The structure of super cycles of packets of reflected signals at the output of the block of their formation is shown in Figure 2.5.
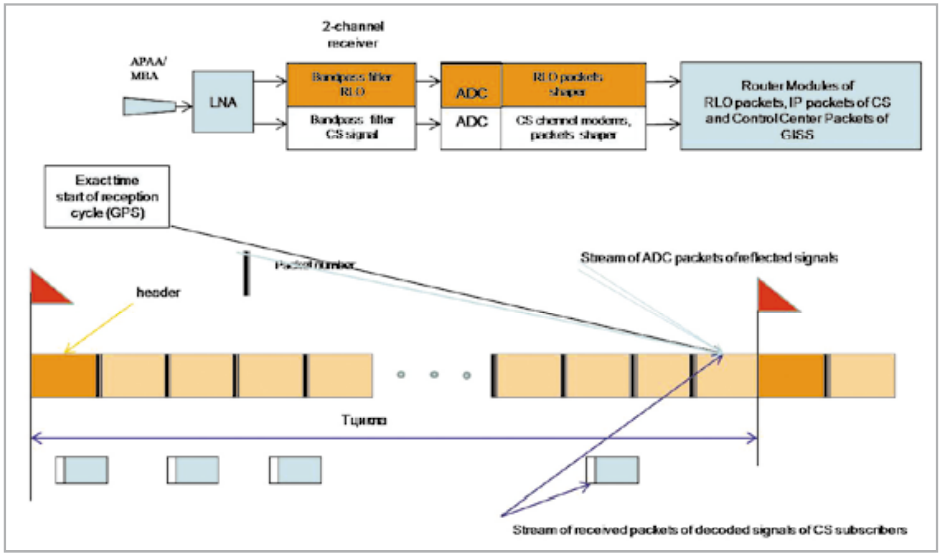
Fig. 2.5
2.1.4 From the output of the satellite radio navigation unit, information in IP data packets with its own packet address enters the input of the corresponding port of the on-board router and contains the spacecraft number, information about spacecraft ephemeris and spacecraft onboard time, necessary to ensure synchronous operation of the pseudo-random sequence generator with K outputs in the unit for generating reflected signals with a narrow beam pattern for the formation of different-angle radar images and their binding to the map on the ground segment of the GISS.
2.1.5 Existing spacecraft and radar surveillance systems have limited capabilities in the width of the simultaneous surveillance zone. These limitations are associated with the used principle of operation based on onboard synthetic aperture radar. The implemented various modes of radar images (route, searchlight, multibeam scanning) have a survey strip in the span ranging from 200 km to 400 km at a low resolution (20-70) meters, at a high resolution up to a few meters, the strip of the shooting frame narrows within 40 km. An improvement in resolution was achieved in the German system TerraSAR-X due to interferometric sounding paired with SAR TanDEM-X up to 0.25 meters, however, only in a survey band of about 4 km.
Reading in the scientific and technical literature about all the problems that need to be solved to implement the best quality of radar surveillance in SAR (SAR) systems, I have a tear in my eyes. At the same time, the proposed method of active-passive observation using communication satellites that do not operate in a pulsed mode and use modern schemes for the formation of emitted signals by each AESA element with a correcting table of amplitudes and phases in front of the DAC does not have technical problems inherent in the spacecraft radar with SAR.
This makes it possible, practically free of charge, to create a space segment within the GISS for continuous radar observation of near-earth space and the earth'ssurface, only by allocating 2 - 4 Gbps bandwidth from the tasks of providing communication services on inter-satellite communication links and on feeder radio lines for dumping signal and information flows on ground GRPS. At the same time, the entire weight and volume of processing for obtaining radar images was transferred to powerful servers and signal processing processors of ground centers.
The radar observation band is provided in the entire visibility zone of each GISS spacecraft (4500—6000) km, and during a flight of 12 - 15 minutes over this territory, it is possible to accumulate radar observations of the required areas of the earth's surface from multiple angles of their illumination.
In traditional SAR (SAR) systems, the dream is to achieve a probing signal bandwidth of 300 MHz to achieve a range resolution of 1 meter, and the problems of aperture synthesis for azimuth resolution are greatly increased.
The proposed method for solving the problem, based on ground-based cross-correlation processing, relatively large in duration arrays of reflected signals (from 10 to 100 ms), such a resolution in units of meters, and when processing with accumulation and up to several tens of centimeters, can be obtained with the OFDM signal bandwidth at (3 ÷ 30) MHz, even considering the possibilities of using the latest successes of using this type of signals in radar, associated with measuring the phase difference on coherent subcarriers.
In contrast to the SAR method, in the proposed method, in a narrow volume of the near-Earth space, limited by the beam width of the antenna pattern emitting a sounding signal, or on the corresponding “illumination” area on the Earth's surface, all reflected signals will have a different time delay, the value of which is determined by mutual correlation processing for the maximum value of the cross-correlation function (CCF). If we consider this process as a rough analogue of a CDMA communication system with code division, then the task of obtaining radar images from all objects in this zone (on this surface) is reduced to searching and identifying from the total aggregate received reflected signal, the partial signal that is reflected from each object, and that is not will be correlated with the signal reflected from the neighboring object, and, in addition, will have another CCF level, depending on the values of the target's effective reflective surface (ERS) coefficient - σ.
The physics of the process lies in the fact that with a total array of processed received reflected signals from each of the objects lying below the noise level by minus 20 - 40 dB, with a processing base of 50 dB to 60 dB, it is possible to obtain the form of CCF (shown in Fig. 2.6), if, in the process of specifying the coordinates, we change discretely the time delay through (0.1 x 1/Fs) between the reference copy of the probing signal and the mixture of reflected signals lying under the noise.
Such a processing algorithm corresponds to one of the possible options for the implementation of the maximum likelihood criterion when processing radar signals, which provides the value of the error in measuring the time delay στ = 1/Fs √N /2Es, where N is the noise energy in a narrow band equal to 1/Tcoh, and Es is the energy of the reflected signal, accumulated in the same band with coherent accumulation of the reflected signal. With repeated cycles of determining the CCF, its values will be modulated by the value of the complex noise vector formed by a complex signal of reception noise and other signals reflected from neighboring surface areas over the entire interval of the sample array used in correlation processing. If we calculate the value of τо as the center of gravity between the left and right sides shown in Fig. 2.6. CCF, then the accuracy will be higher and is determined by the Es/N ratio.
If we consider the form of the obtained cross-correlation function (CCF) shown in Figure 2.6 when processing a signal array with conditionally pseudo-random modulation, which is implemented by constant scrambling of the transmitted information on subcarriers, it is easy to understand that the accuracy of determining the position of the CCF maximum on the delay scale τ is defined as στ = 1/Fs √N/2Еs and can range from 10% to 2% of the duration of 1/Fs, where Fs is the signal bandwidth.
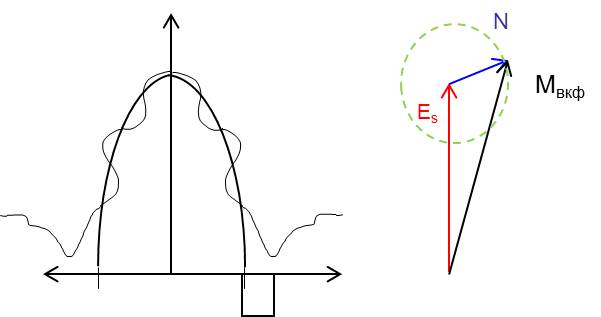
- Fig. 2.6
The number of periods of modulation by the noise vector of the CCF slopes depends on the 1/Fs ratio and the duration of the processed array.
For most applied radar tasks, such clarifications of the position of the CCF on the τ scale are not required, but if you want to distinguish the B-52 aircraft from the new B-2 aircraft parked at an airbase or in flight using a 3D radar image model, or in what state the “Topol” (or mobile complex” Patriot “) — in the stowed position or with a rocket ready for launch, you will have to deal with such additional processing.
2.1.6 If we consider the emission characteristics of the implemented spaceborne SAR systems, all of them have a pulsed radiation power in the range of 1:—2 kW, and a sounding pulse duration from 10 mks to 40 mks, usually with internal LFM modulation. For example, the Japanese ALOS spacecraft with the PALSAR radar has a radiation power of 2.0 kW, a sounding signal bandwidth of 14 or 28 MHz, a transceiver APAA gain of about 35 dB and has shown good results.
In the proposed method, in order to increase the spatial resolution, it is necessary to use relatively long arrays of processed signals in cross-correlation processing. Using the interval of accumulating the energy of the reflected signal not 10- 40 μs, but 10—40 ms, in the proposed active-passive radar mode, we provide a gain of 30 dB with coherent processing, compared to SAR systems.
Keeping the radiation power of 1—2 kW, which is also required to ensure a high information transfer rate in the provided communication services, it is possible to reduce the requirements for the directional properties of receiving and transmitting AESAs spaced on different spacecraft by the same amount of 30 dB in order to provide similar characteristics of radar data. This will ensure the simultaneous expansion of the radar sensing area and the provision of broadband communication services.
If, considering the active-passive RLO mode, we take a code division communication system (CDMA) as an analogue, then with a signal bandwidth of 3—30 MHz (65—75 dBHz), even with a decision threshold of 12 dB, up to 200,000 or 2,000,000 subscribers (53—63 dB) transmitting information at a rate of 10 bps. Or using the method of analogs — from 200,000 to 2,000,000 radar image elements on the illumination area of the beam pattern of the transmitting antenna with a width of 10°-13°.
This will allow obtaining radar images of the terrain in a close to the sub-satellite point with a radius of 140 km with a resolution of at least 100 m, processing only one signal and information array of reflected and sounding signals with a duration of about 100 ms. When processing of the insertion of a special SAR signal with a known signal-code structure on the radiation interval, to obtain radar images, only retransmission of the array of received reflected signals is required. Possibilities of the synthesis of the aperture of narrow receiving antennas during processing and multi-angle accumulation of radar images make it possible to further expand both the zone of simultaneous observation of the earth's surface and the resolution.
2.1.7 Traditional SAR of radar spacecraft use transceiving antenna systems in the form of rectangular AESA of size (9—12) x3 m (for L-band) and about 6x2 m (for C- and X-bands), which provide a narrow band observations, or parabolic reflector antennas with a narrow scanning spot of a limited area of space (in the Cand X-bands). In GISS it is required to provide a wide area (about 5000 km) for the provision of both communication services and radar sensing. At GISS orbital heights of 400—800 km, the solid angle of view of the entire service area is about 120°. AESA with of 259-320 elements, shown in Figure 2.7, can provide the formation of a narrow receiving beam scanning in the entire such zone in the ground GRPS with a coefficient of more than 23 dB.
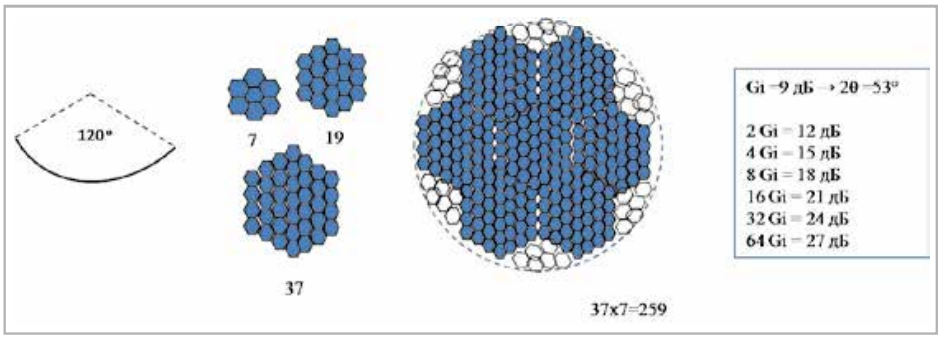
Fig. 2.7
In such an AESA on the SRPS, you can always select 64-128 AE and form a narrow pattern at the required point of the reflected signal reception area. If in this case each AE is created with a gain not of 3 dB, as usual, but with Gi 9 dB, then the total value of Gaa= 26-28 dB can be achieved. This solution allows for a significant reduction in the weight and size parameters of the onboard equipment.With such a large number of AEs in the receiving AA, one can assume great complexity in the implementation of the code multiplexing scheme for receiving the reflected signals, shown in Fig. 2.4. This task can be simplified by implementing it in seven separate submodules, as shown in Figure 2.8. In this case, the signals from each adjacent seven AEs in each of the seven sub lattices of 37 AEs must be distributed over seven different sub modules for the formation of signal-information flows of reflected signals so that their reception noises are guaranteed not to be correlated in each of the seven formation submodules.
The transmitting AESA can be flat with Gi 3 dB and consist of 64 AEs, providing a probe signal radiation power of 32 W by each element with the possibility of increasing the total radiation power in a narrow beam to 2 kW with a gain of up to 21 dB. Also, other options for creating transmitting AESAs can be worked out, which can provide a high rate of transmission of IP-traffic to the required 19-37 narrow service areas with minimum values of power taken from the radar task.
2.1.8 Let us consider the requirements for the throughput on the feeder radio lines and ISLs required to reset the signal and information flows of the reflected signals of radar sounding.
- Fig. 2.8
Let the L-band use an OFDM signal with a bandwidth of 3 MHz, a signal filter bandwidth of 3.5 MHz, an analog-to-digital conversion sample rate of 7.0 Msampleps,and the number of bits at the output of the sample compression unit — 4. Thus, the initial the formation speed will be at least 28 Mbps, plus up to 10% of the cost of packet headers, in total about 30 Mbps. With seven sub modules of formation — 210 Mbps.
For the X-band with a 30 MHz OFDM signal bandwidth, we will similarly obtain an estimate in the region of 2.1 Gbps. Of course, these are rough estimates; their refinement requires modeling and experimental development in the design of the GISS.