«Let my intellectual technical people go. Go to save worldwide society.»
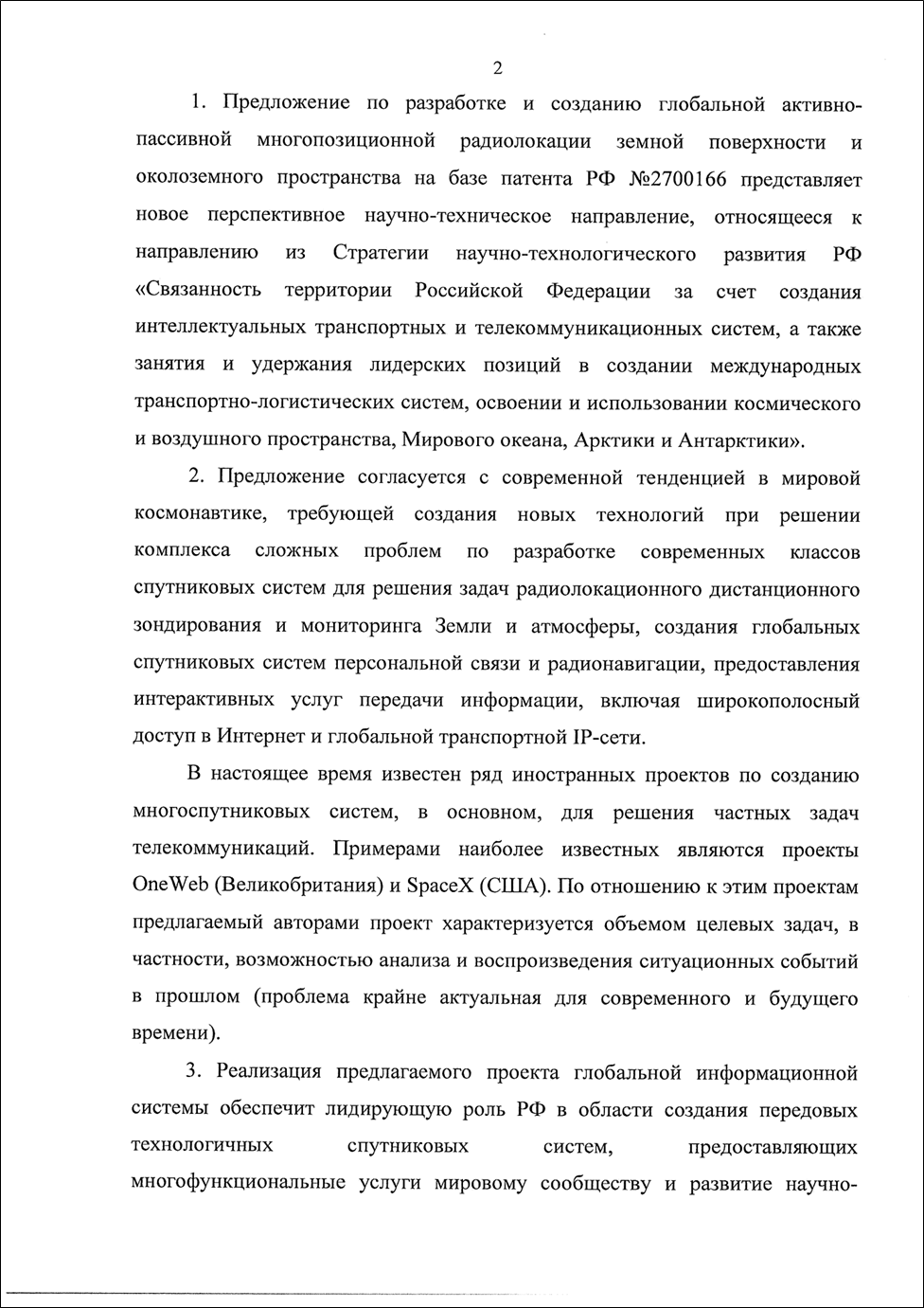
Глобальная информационная спутниковая система
Начинаем проектирование в интересах всего мирового сообщества
Почему мир нуждается в ГИСС
Обеспечение коллективной безопасности в области контроля за стратегическими наступательными силами эвентуальных противников
Обеспечение спутниковой персональной связи, широкополосного доступа в Интернет и интерактивных услуг связи в любой точке Земли
Расследование террористических актов и чрезвычайных происшествий


Руководитель проекта
Моисеев Николай Иванович

Рецензии


Предложения
Виды и сроки поставок составных частей наземных ППиО
Дата: 24.06.2021
Глобальная информационная спутниковая система: Глобальная информационная спутниковая система (GSS) — проект американской глобальной системы спутникового широкополосного доступа (GWAN), которая должна была охватить весь мир.
Читать полностью